A Gentle Introduction to Deep Learning for Graphs
- 杂志: None
- IF: None
- 分区: None
介绍
graph数据是广泛存在的。
深度学习在graphs数据上的研究,需要克服几个挑战:
- 模型需要对不同大小、拓扑结构的graphs可用
- 节点的信息可能比较稀缺
- graphs是离散对象,可微性不是很好,而其组合特性又限制了我们使用类似穷举的方法进行求解
- 有些graphs存在循环
深度学习在graphs上的研究历史:
- 早期就有使用RecNN(递归神经网络)【98,32,9】来对tree structured data进行建模的历史,但其无法处理带有cycles的graphs。
- GNN【89】和NN4G【74】可以处理带有cycles的graphs。两者分别为两类方法打下了基础(recurrent-GNN和feedforward-NN4G),特别是后者,是GCN的基础。
本研究希望能够对DL在graphs上的方法进行一个介绍,涉及的前沿的方法可能比较少,更多地作为一个tutorial,来巩固一些经典算法。
概述
数学符号
graph:\(g=(\mathcal{V}_g, \mathcal{E}_g, \mathcal{X}_g, \mathcal{A}_g)\)
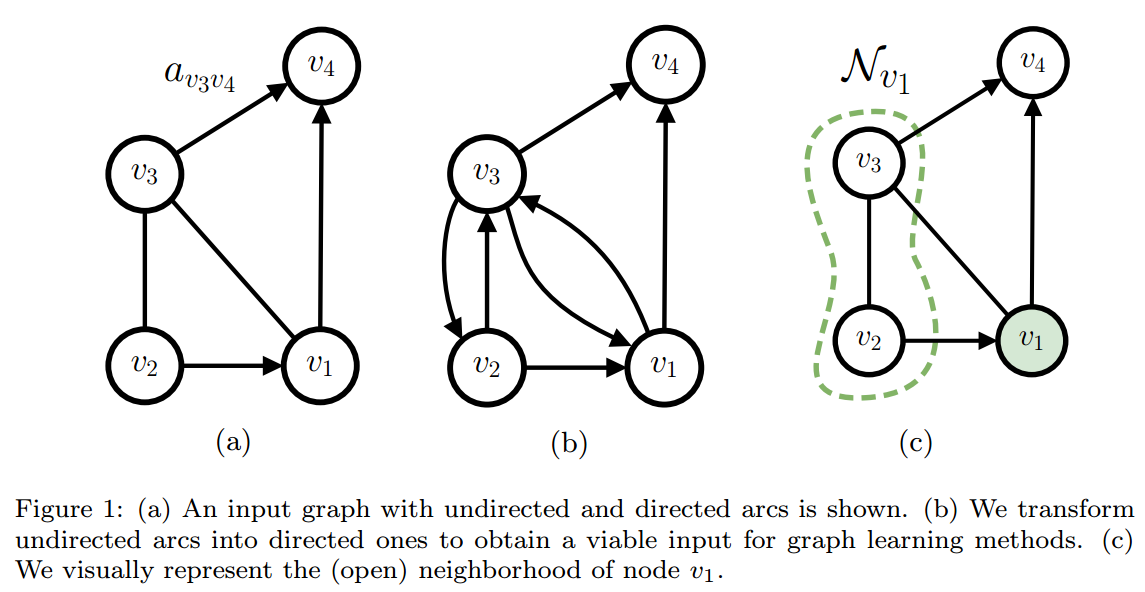
其中节点集合\(\mathcal{V}_g\),边的集合\(\mathcal{E}_g\),如果是directed edges,则\(\mathcal{E}_g=\{(u,v)|u,v\in\mathcal{V}_g\}\),如果是undirected edgs,则认为\((u,v)=(v,u)\),\(\mathcal{E}_g\)同时拥有两个方向的arcs。有时候可以直接使用邻接矩阵\(\mathbf{A}\in{0,1}^{|\mathcal{V}_g|\times|\mathcal{V}_g|}\)来表示\((\mathcal{V}_g, \mathcal{E}_g)\)。
节点\(v\)上的特征是\(\mathbf{x}_v\in\mathcal{X}_g\),边\((u,v)\)上的特征是\(\mathbf{a}_{uv}\in\mathcal{A}_g\)。节点、边、整个graph的标签使用\(y_v,y_{uv},y_g\)来表示。
如果graph的节点定义了一个顺序,则称之为是ordered,反之是unordered。如果边的集合和一个自然数的集合存在双射,则称为positional,反之称为non-positional。我们关注的是unordered和non-positional的graph。
节点\(v\)的邻域(neighborhood)定义为\(\mathcal{N}_v=\{u\mathcal{V}_g|(u,v)\in\mathcal{E}_g\}\)。这个也成为了open neighborhood,有时候我们也把\(v\)本身也加入其中,这时称为closed neighborhood。进一步,结合边的特征,我们可以定义特征符合条件的neighborhood\(\mathcal{N}_v^{c_k}=\{u\in\mathcal{N}_v|\mathbf{a}_{uv}=c_k\}\)。
原始文献PDF这里应该是写错了(第6页第3行,应该是v而不是u)
在图论中,neighborhood不是点的集合,而是一个subgraph,是邻接点及其与指定点的边组合成的subgraph。
\(l\)用来表示第\(l\)层或第\(l\)个迭代步骤,\(\mathbf{h}_v^l\)表示节点\(v\)在第\(l\)层或第\(l\)个迭代步骤后得到的特征。
使用\(\Psi\)来表示permutation invariant function。当其输入(一般来说输入是一个集合)的元素数量是可数时,可以大致将其写成下面的形式: \[\Phi(Z)\approx\phi(\sum_{z\in Z}{\psi(z)})\] 其中\(\phi\)和\(\psi\)是任意的函数。
动机
自适应地学习到新的特征进行下游的任务。
概览
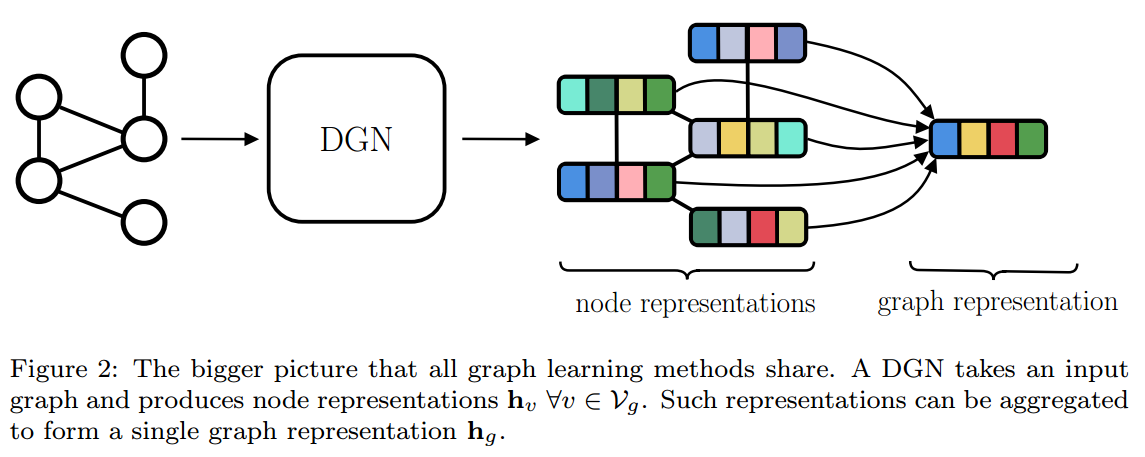
不管任务是什么,几乎所有的算法首先都生成节点的表示,这称为graph的isomorphic transduction。然后在此基础上,再根据任务的不同进行后续的操作。
这里,我们DGN来同一描述这些所有的算法,具体来说,是这些算法中从graph到生成节点特征的部分,如下图所示。
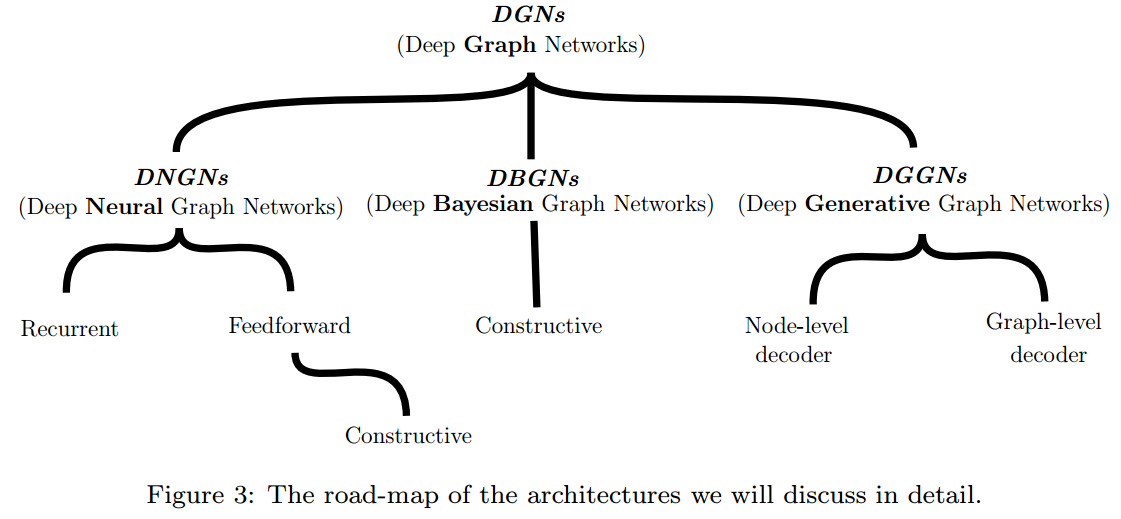
DGN被进一步分为3类:
- DNGNs(Deep Neural Graph Networks)
- DBGNs(Deep Bayesian Graph Networks)
- DGGNs(Deep Generative Graph Networks)
局部关系和信息的迭代处理
对于graph的处理面临以下两个基本问题,而且讨论了其普遍的解决方案(“局部和迭代”方法)。
graph的拓扑结构是没有什么限制假设的
这一般通过在node level局部地而不是在graph level全局地建立模型来完成【98】,即考虑的是节点和其邻节点间的关系。这称为stationary assumption。
但stationary assumption并没有完全解决问题,因为每个节点所拥有的邻接点的数量是变化的。所以,一般还需要使用permutation invariant function来将邻接点集合进行处理。
可能存在cycle
解决这个问题的方法是建立迭代机制,即\(\mathbf{h}_v^{l+1}\)是第\(l\)次迭代的邻接点特征计算得到,这样就算是有cycle存在,也可以方便被纳入其中(可以看做自我更新)。另外,迭代机制也可以很方便地集成到深度架构中。
context diffusion的3种机制
context指的是计算节点特征所使用的信息。context diffusion描述的是我们如何将单个节点的信息传递到整个网络中,毕竟我们不希望节点信息被只限制在它的小邻域中。
之前介绍的“局部和迭代”方法可以实现context diffusion。如下图所示:
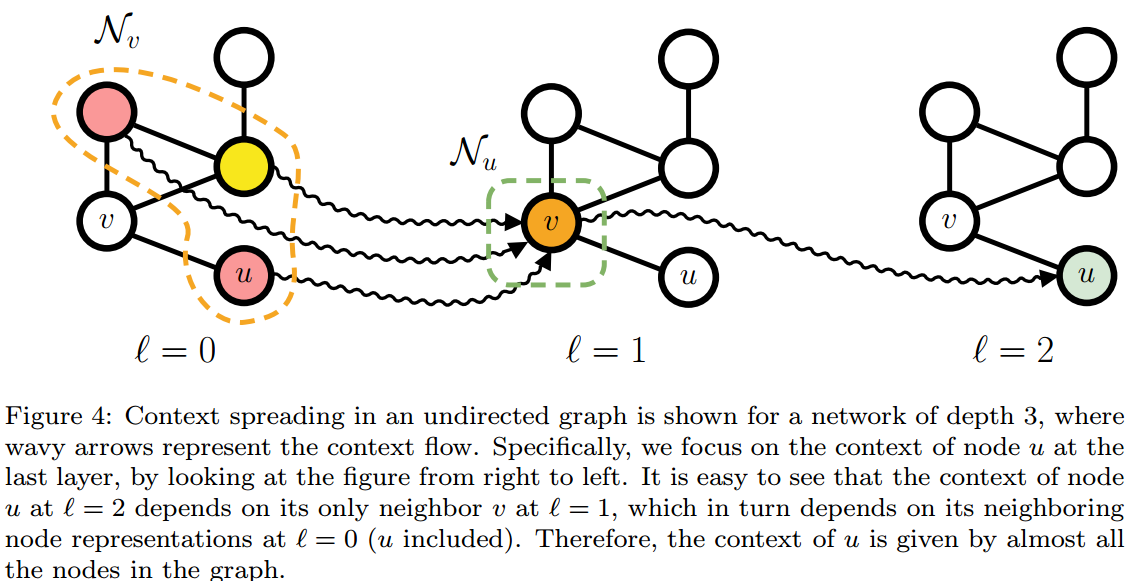
通过两层的迭代,节点\(u\)能够接收到更多节点的信息。而如果增加到第3层迭代,则\(u\)将接收到所有节点的信息。这也说明了深度不仅有助于特征的自动化处理,而且还对context diffusion。
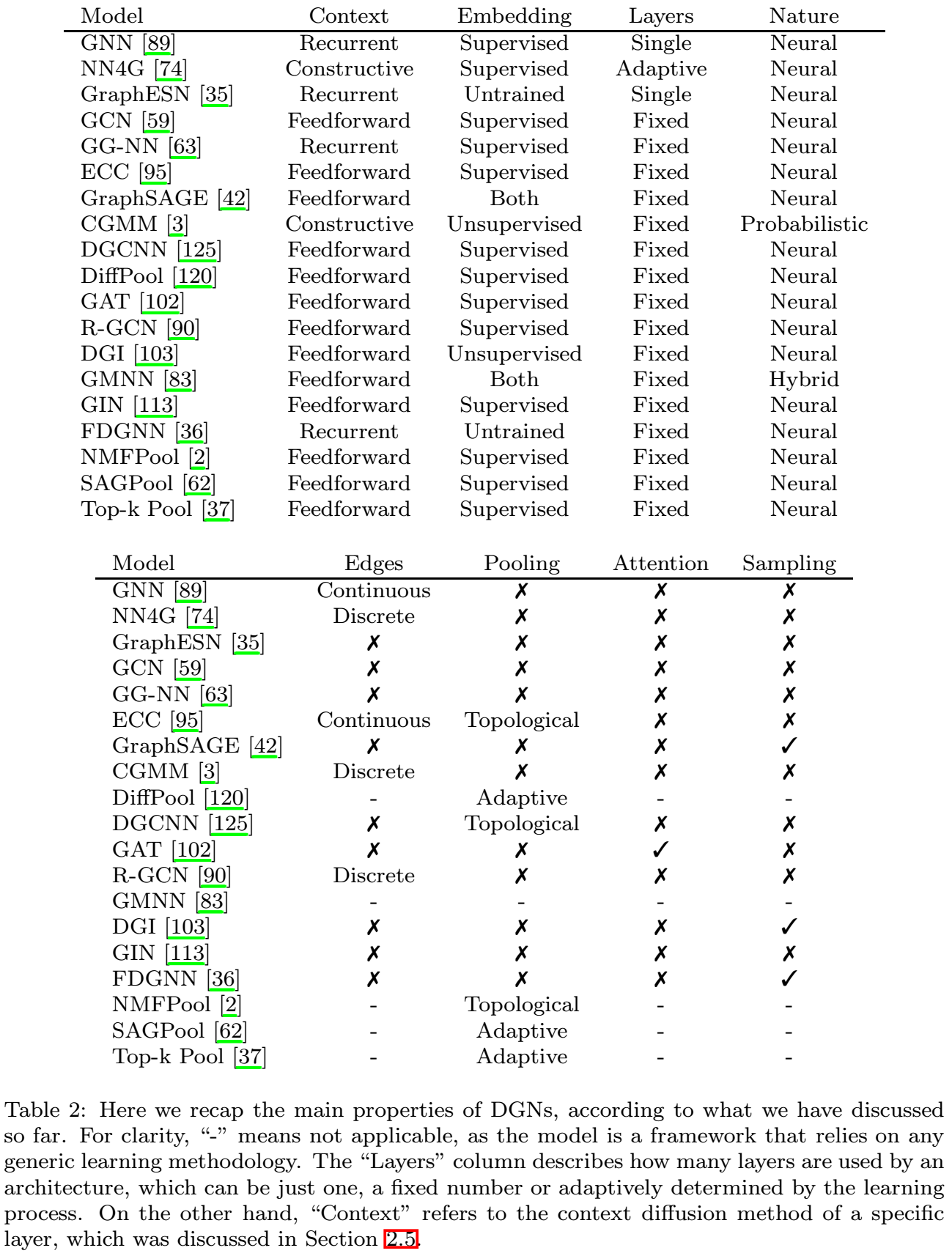
根据context diffusion实现机制的不同,我们将DGNs的模型分为下面3类:
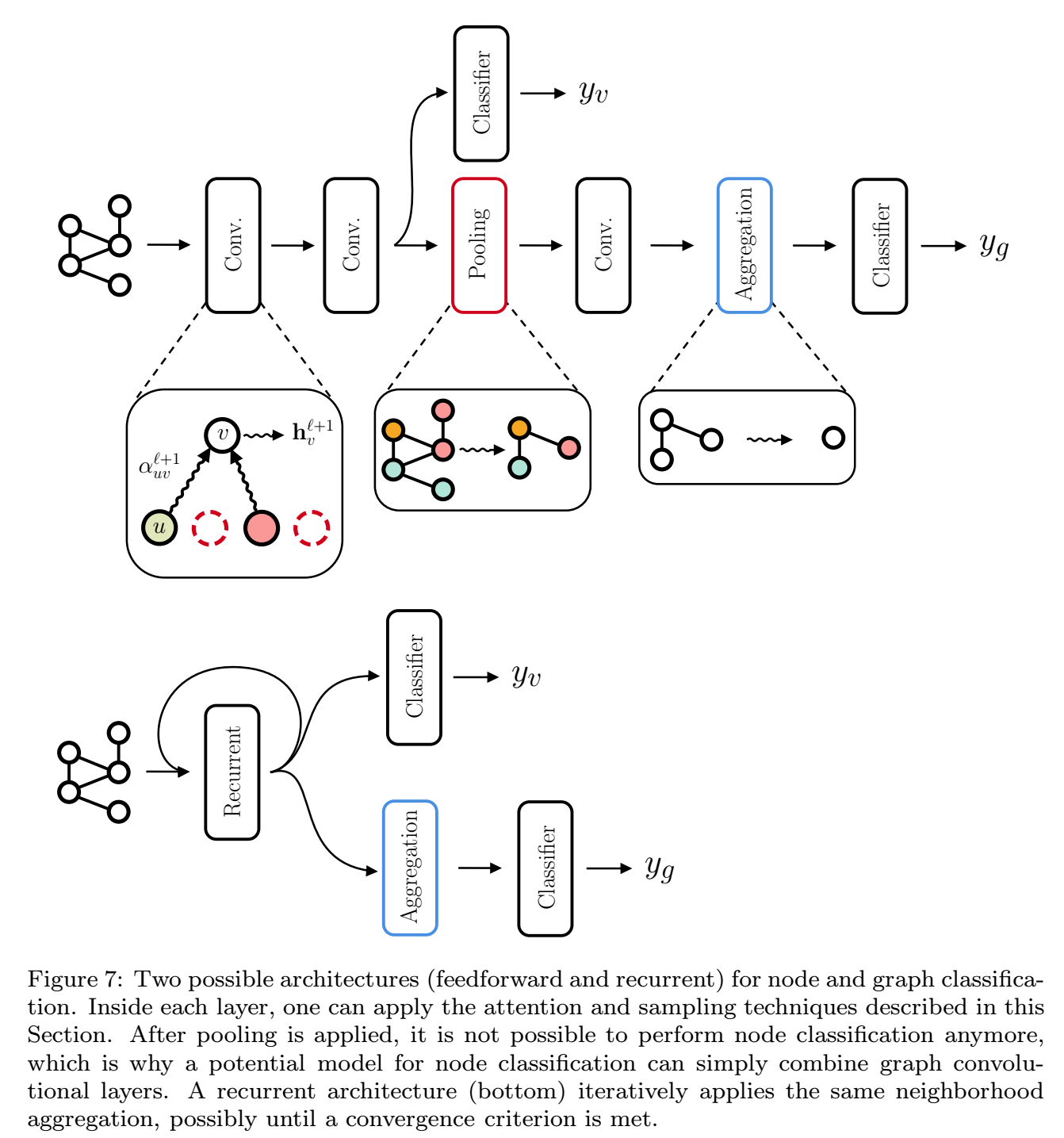
Recurrent Architectures
代表是Graph Neural Networks(GNNs)【89】和Graph Echo State Networks(GESNs)【35】,通过在一个操作上进行反复的迭代计算来实现context diffusion。一般需要通过动力学上的限制使得在recurrent iteration的时候收敛。
Feedforward Architectures
没有使用迭代,而是通过堆叠多层来实现。和recurrent architecture相比,每一层(或迭代)使用的是不同参数的layers,而且不需要有收敛的限制。
这也是最常见的,我们接触到的大多数图神经网络都是这个。
Constructive Architectures
可以看做是Feedforward architecture的特殊形式,区别在于其训练时是逐层训练的。
好处在于这可以避免一些梯度消失/爆炸的问题,所以context可以更加有效地传递到其他节点中。并且在逐层训练时,还可以通过某些策略自动确定使用的层数。
代表有Neural Network for Graphs(NN4G)【74】和Contextual Graph Markov Model(CGMM)【3】。
构建模块
介绍我们构建模型常使用到的模块,以及如何将这些模块进行组装构成一个模型。
邻接点聚合(Neighborhood Aggregation)
这里我们假设graphs是non-positional,所以我们需要使用permutation invariant function。
最general的形式,如下:
\[\mathbf{h}_v^{l+1}=\phi^{l+1}(\mathbf{h}^l_v,\Psi(\{\psi(\mathbf{h}_u^l)|u\in\mathcal{N}_v\})) \tag{1}\]
处理graph的edges
上面的公式并没有考虑到edges的特征。如果edges的属性是离散的(比如边的类型有2种),则我们可以将上面的公式1进行修改: \[\mathbf{h}_v^{l+1}=\phi^{l+1}(\mathbf{h}^l_v, \sum_{c_k\in\mathcal{A}}{(\Psi(\{\psi(\mathbf{h}_u^l)|u\in\mathcal{N}_v^{c_k}\})\cdot w_k)}) \tag{2}\]
其中\(c_k\)是边的标签,\(w_k\)是该边对应的贡献度,是一个可训练的参数。NN4G、R-GCN和CGMM都实现了公式2。
更general,针对边的特征是连续的: \[\mathbf{h}_v^{l+1}=\phi^{l+1}(\mathbf{h}^l_v, \Psi(\{e^{l+1}(\mathbf{a}_{uv})^T\psi(\mathbf{h}_u^l)|u\in\mathcal{N}_v\})) \tag{3}\]
其中\(e^{l+1}(.)\)和\(\phi\)、\(\psi\)一样,可以是任意的函数。
注意力机制
需要给与一个注意力权重,此权重由两点的特征进行计算,可以使用下面的公式描述:
\[\mathbf{h}_{v}^{l+1}=\phi^{l+1}(\mathbf{h}_v^{l}, \Psi(\{\alpha_{uv}^{l+1}\cdot\psi^{l+1}(\mathbf{h}_u^l)|u\in\mathcal{N}_v\}))\tag{4}\]
其中\(\alpha_{uv}\)就是注意力权重,在GAT【102】中,其计算时没有考虑边的特征: \[\alpha_{uv}^l=\frac{\exp(w_{uv}^l)}{\sum_{u'\in\mathcal{N}_v}{\exp(w_{u'v}^l)}}\] \[\begin{aligned} w_{uv}^l&=a(\mathbf{W}^l\mathbf{h}_u^l,\mathbf{W}^l\mathbf{h}_v^l) \\ &=LeakyReLU((\mathbf{b})^T[\mathbf{W}^l\mathbf{h}_u^l,\mathbf{W}^l\mathbf{h}_v^l]) \end{aligned}\] 其中\([:,:]\)表示concatenation。另外GAT还使用了multi-head attention,即将多个注意力机制的输出concat或average。
采样
当graphs比较large或dense的时候,邻接点数目太多,就不适合将全部的邻接点进行处理,sampling是自然的解决这个问题的想法。
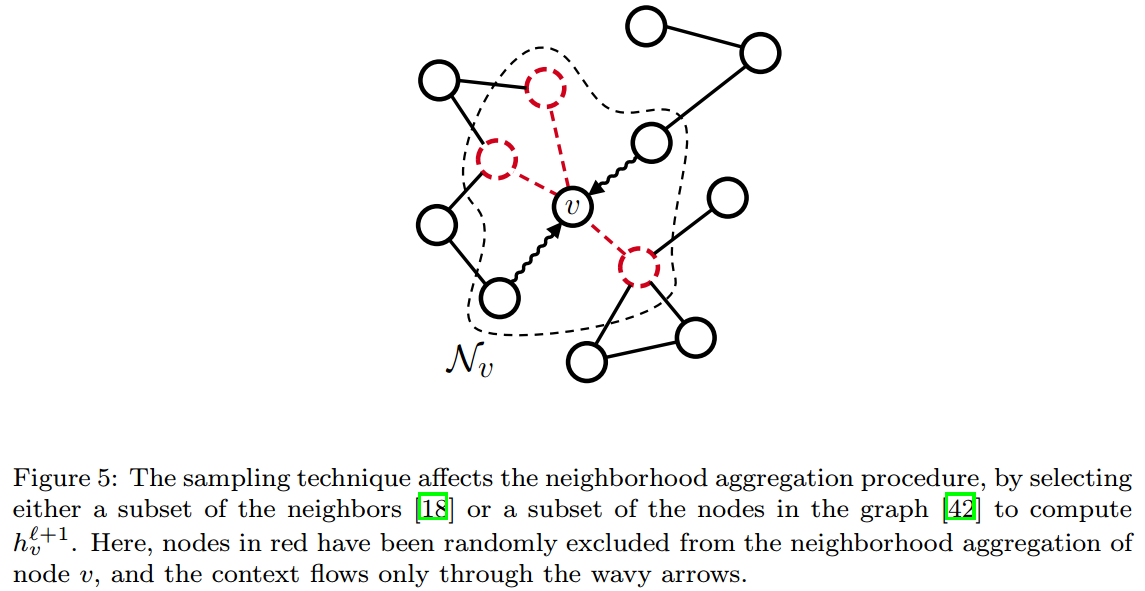
采用这种策略的模型有FastGCN【18】和GraphSAGE【42】:
- FastGCN:在每一层,使用importance sampling进行采样(降低方差)。
- GraphSAGE:通过一些策略来选择本次传递信息到目标节点的节点是哪些,这些节点可能不只是目标节点的邻接点,还有可能是目标节点的二阶邻接点、三阶邻接点等。所以GraphSAGE可能不止有locally的能力。
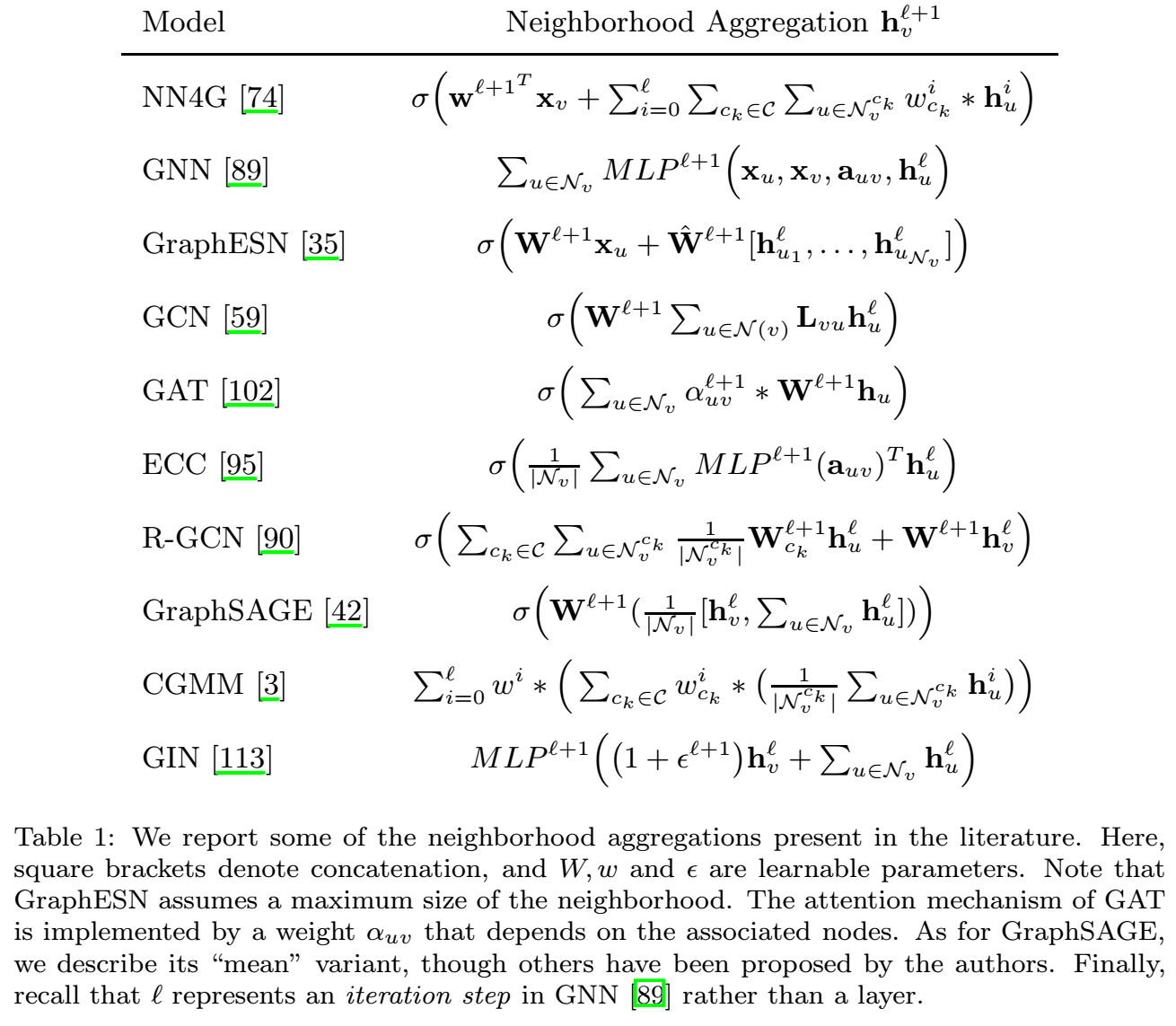
下面的tab1列举了我们常用的进行node aggregation的各种方法,可以参考使用:
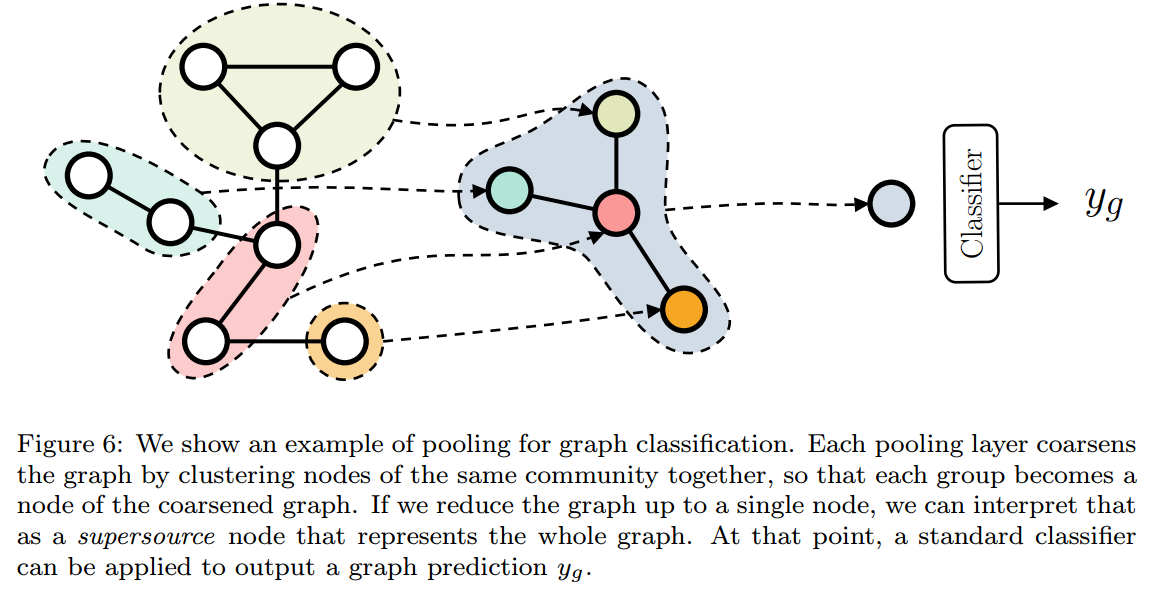
池化
pooling主要有3个作用:
- 发现重要的communications。
- 将communications的信息注入到学习的features中。
- 降低计算复杂度
pooling可以分为两类:
adaptive,自适应
参数化的、可学习的决定怎样进行pooling。
DiffPool【120】,首先使用本层学习到的特征计算一个soft-membership matrix \[\mathbf{S}^{l+1}=softmax(GNN(\mathbf{A}^l, \mathbf{H}^l))\tag{5}\] 然后再使用这个matrix重新构筑graph \[\mathbf{H}^{l+1}={\mathbf{S}^{l+1}}^{T}\mathbf{H}^l\quad\text{and}\quad \mathbf{A}^{l+1}={\mathbf{S}^{l+1}}^T\mathbf{A}^l\mathbf{S}^{l+1}\] 根据你想要的保留多少个节点来设置\(\mathbf{S}^{l+1}\)的维度。因为是soft的,所以整个过程可微,同时使得经过其pooling后的graph是全连接的。
TopKPool【37】,设置了一个可学习的projection vector \(p^l\)来计算一个scores, \[s^{l+1}=\frac{\mathbf{H}^lp^{l+1}}{||p^{l+1}||}\] 保留这个scores排名靠前的节点和他们之间的相互联系。
SAGPool【62】则在TopKPool的基础上,使用attention score替代了projection vector \[s^{l+1}=\sigma(GCN(\mathbf{A}^l,\mathbf{H}^l))\]
EdgePool【33】则将目标放在了边上,为边计算一个权重,权重靠前的边连接的两个节点会被融合成一个, \[s^{l+1}((u,v)\in\mathcal{E}_g)=\sigma(\mathbf{w}^T[\mathbf{h}_v^l,\mathbf{h}_u^l]+\mathbf{b})\]
topological,基于拓扑学的
比如GRACLUS【22】使用谱聚类、NMFPool【2】基于非负矩阵分解等。
用于graph embedding的node aggregation
现在的我们的任务是得到一个graph的feature,所以需要将node features进行聚合得到graph feature,同样这个过程必须是permutation-invariant。
最常用的就是直接使用sum、max、mean等函数。【123】则进行了一些细致的研究,其先对node features进行一次MLP映射,然后进行summation,然后经过一个非线性映射完成。
至于使用那些特征来计算graph feature:
- 最常见的是只使用最后一层的feature
- 将所有中间层的feature都concat
- 将所有中间层的feature看做是一个feature sequence,使用LSTM来处理【64】
- SortPool【125】
任务
无监督学习
Link prediction
试图去建立node representation,使得相邻的node之间是相似的。所以其reconstruction loss【59】可以写成 \[\mathcal{L}_{reg}(g)=\sum_{(u,v)}{||\mathbf{h}_v-\mathbf{h}_u||^2}\tag{10}\]
另外,也可以把edge看做存在或不存在,从而构建probabilistic的formulation【58】 \[P((u,v)\in\mathcal{E}_g|\mathbf{h}_v,\mathbf{h}_u)=\sigma(\mathbf{h}_v^T\mathbf{h}_u)\tag{11}\]
使用上面的loss,意味着你认同这样的假设:相邻的节点应该有更大的倾向被分到相同的community/class中,这称为homphily【69】。这也可以在监督学习中作为一个正则化出现。
Maximum Likelihood
当认为neighborhood服从一定的分布时,我们可以使用极大似然法进行训练。一个典型的例子是CGMM【3】,其堆叠了simple Bayesian Networks,每一层有下面的likelihood: \[\mathcal{L}(\theta|g)=\prod_{u\in\mathcal{V}_g}\sum_{i=1}^CP(y_u|Q_u=i)P(Q_u=i|\mathbf{q}_{\mathcal{N}_u})\] 其中,\(Q_u\)是每个节点的隐藏类别,一共有\(C\)类别。\(\mathbf{q}_{\mathcal{N}_u}\)是节点\(u\)的所有邻接点的特征。\(y_u\)是节点\(u\)的一个特征。
这个有点像节点分类了。
用到类似技术的还有【83,58】的研究。
Mutual Information
最大化两个相似的graphs之间的MI作为无监督学习的loss。比如DGI【103】,其先使用corruption function(就是添加噪声等扰动操作)生成一个\(g\)的扰动版本\(\widetilde{g}\),然后训练一个discriminator来识别两个图。
Entropy regularization for pooling
当使用adaptive pooling的时候,模型会趋向于将每个节点分给单个community。【120】使用了entropy loss来解决这个问题: \[\mathcal{L}_{ent}(g)=\frac{1}{|\mathcal{V}_g|}\sum_{u\in\mathcal{V}_g}H(\mathbf{S}_u)\] 其中\(H\)表示计算entropy,\(\mathbf{S}\)表示soft-cluster assignment matrix(公式5),\(\mathbf{S}_u\)表示其中表示\(u\)的那一行。
监督学习
Node Classification
这里有两种类型的node classification,即:
- inductive node classification,在一张(或多张)graphs上学习得到模型后,在一张新的graphs上进行分类。
- transductive node classification,只有一张graph,其中有一些节点类型未知,对这些节点进行分类。
我们会发现benchmark上的结果和实验环境的设置息息相关【93】。
Graph Classification/Regression
与node相比,这里就是多了一个node aggregation的过程。
同样的,也存在着各种实验基准不一样导致的混乱。【25】推荐了一个同一的平台来进行评价。
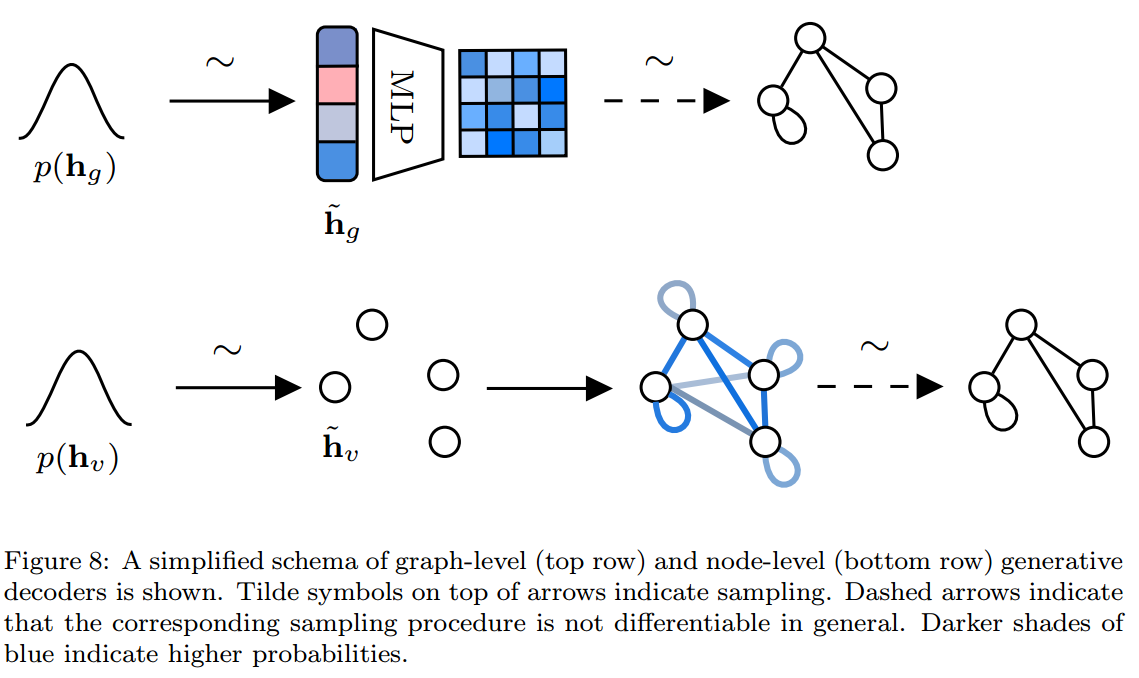
生成学习
Graph-level decoding
输入一个graph的embedding,输出一个dense probabilistic的adjacency matrix \(\widetilde{\mathbf{A}}\in\mathbb{R}^{k\times k}\),其中\(k\)表示允许最多的节点数目,元素\(\widetilde{a}_{ij}\)表示节点\(i\)和\(j\)间存在连接的概率。然后使用极大似然法进行训练: \[\mathcal{L}_{decoder}(g)=-\log P(\widetilde{\mathbf{A}}|\widetilde{\mathbf{h}}_g)\tag{14}\] 其中\(P(\widetilde{\mathbf{A}}|\widetilde{\mathbf{h}}_g)=MLP(\widetilde{\mathbf{h}}_g)\)。
得到probabilistic adjacency matrix后,要想得到一个novel graph,有下面的3种方法:
- 直接根据概率\(\widetilde{a}_{ij}\)进行采样
- 在probabilistic和ground truth之间进行approximate graph matching【96,60】
- 使用Gumbel-Softmax将采样过程可微【20】
Node-level decoding
即首先我们采样得到的不是graph的representation,而是很多个node的representation。然后根据这些node的representation看是否两个nodes之间有连接: \[\mathcal{L}_{decoder}(g)=-\frac{1}{|\mathcal{V}_g|}\sum_{v\in\mathcal{V}_g}\sum_{u\in\mathcal{V}_g}\log P(\widetilde{a}_ij|\widetilde{\mathbf{h}}_u,\widetilde{\mathbf{h}}_v)\] 其中的概率可以通过公式11的方式进行计算。这样的生成过程是permutation-invaraint的,但相对来说计算量特别大。
Generative Auto-Encoder
不止可以进行graph generate,还能够得到graph的embedding,原理基于VAEs。公式可以表示为: \[\mathcal{L}_{AE}(g)=\mathcal{L}_{decoder}(g)+\mathcal{L}_{encoder}(g)\] 其中的\(\mathcal{L}_{decoder}(g)\)就是上面使用的loss,而\(\mathcal{L}_{encoder}(g)\)是保证latent space的distribution和某个特定的distribution之间的相似的一个“prior” regularization。 \[\mathcal{L}_{encoder}(g)=-D_{KL}[\mathcal{N}(\mathbf{\mu},\mathbf{\sigma}^2)||\mathcal{N}(\mathbf{0},\mathbf{I}))]\]
【14】建议可以将encoder error改为Wasserstrain loss。
Generative Adversarial Networks
【27】使用graph-level decoder充当G生成adjacency matrix和node label matrix,然后将这些内容送入一个discriminator中进行判断。
【107】则使用的是node-level的decoder。
总结
其他
还有一些主题没有被上面的分类覆盖,在这里进行简要介绍。(只关注于DL的方法,且只关注于基于“局部和迭代”策略的。)
Kernel
kernel被定义为计算一对输入间相似性的正定函数的推广形式。比如【94,84,115,31,104】即使用kernel来对graph进行操作。
kernel的主要问题在于其不是local和adaptive(自适应的),需要人类进行设计,其对于人类已经了解的性质自然非常好用,但对于其他的大量的未知,则无法触及。
基于kernel的方法一般和SVM一起来进行graph classification。
Spectral methods
Laplacian smoothing【86】、graph semi-supervised learning【81,17】、spectral clustering【105】、Graph Fourier Transform【46】、GCN【59】(是对其的一阶近似)
Random-walks
【67,104,85,50】
Node2Vec【40】、DeepWalk【82】
最近,该技术已经用来进行graph generate【12】和探索context diffusion【114】
Adversarial training和attacks
【131,28,117,54】
Sequential generative models
【65,121,5,4】
挑战
- Time-evolving graphs,即随时间变化的graphs,【63,110,124】等研究讨论过类似的问题。
- Bias-variance trade-offs
- 合理使用edges information,将edge informations作为context进行传播是否合理?
- Hypergraph learning,hypergraph指的是node set之间进行连接的对象。已经有一些研究进行了讨论【129,128,29,53】,但类似的于Time-evolving graphs,主要的问题在于缺乏数据集。
应用
这里强调,如果可以有更加通用的方法来解决(比如存在顺序等信息可以使用LSTM或CNN来解决),则使用这些方法可能是更好的选择。
化学和药物设计
- Quantitative Structure-Activity Relationship(QSAR)和Quantitative Structure-Property Relationship(QSPR)分析,分别是用化学结构来预测生物活动和化学性质(毒性和溶解性等)【9,76】。
- 化学结构相似性【24,52】。
- 药物设计,特别是使用生成模型来设计符合特定化学性质的分子。
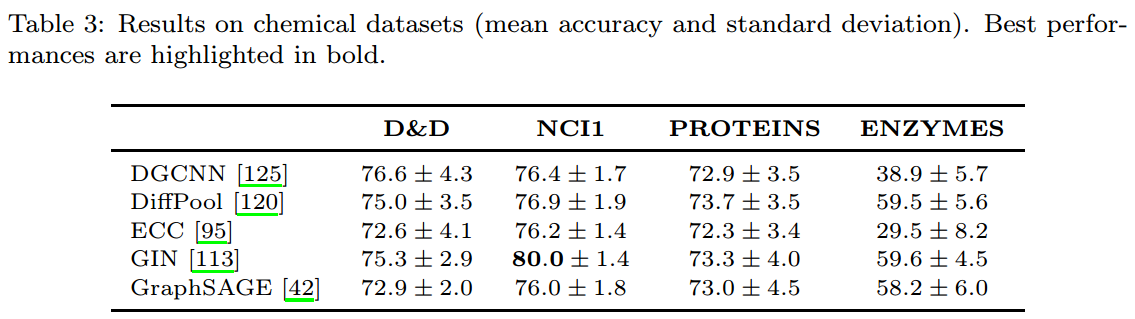
以下是【25】中对一组DGNs在该领域的相关评估:
社会网络
节点是人,边表示朋友关系或共事关系,目的是检测人是否有不健康的行为或错误信息。因为隐私保护和伦理的问题,许多数据集是不公开的。
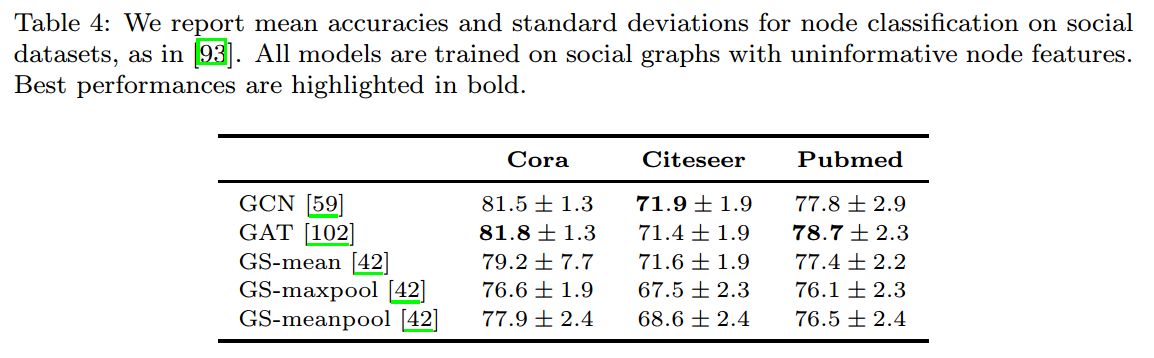
现在主要使用的节点分类的数据集有3个,【93】使用这3个数据集对常用的几个DGNs进行了评价:
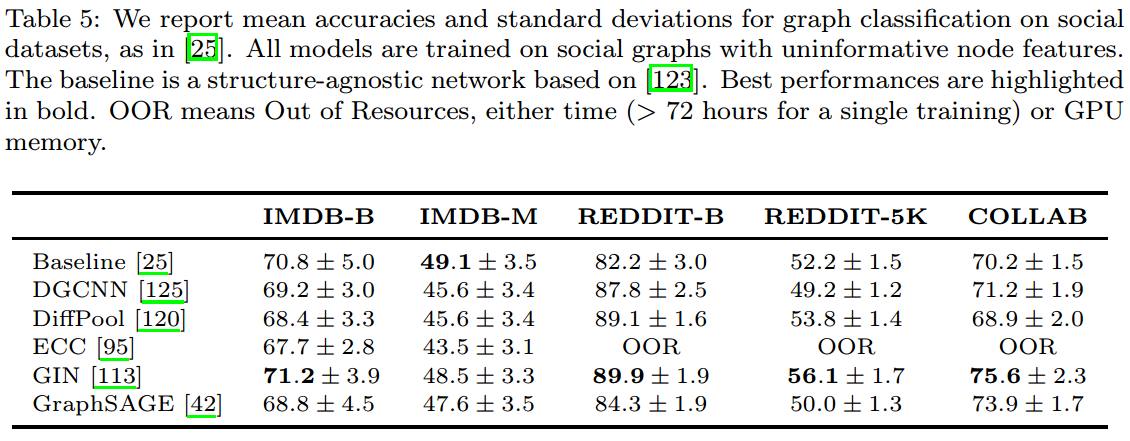
而常用的graph分类的数据集有以下5个,在常用DGNs上的结果如下:
自然语言处理
将语言根据语法分解为tree,然后进行学习建模。【1,71,70,8】
安全性
静态代码分析
时空预测
道路网络的交通预测【122】、动作识别【109】、供给链任务【56】。
需要能够学习到随时间改变,graph结构的变化。
一般需要结合DGNs和RNNs。
推荐系统
这里使用的graph是用户和产品组成的一个bipartite graph。任务可以看做是link prediction,已经有些研究涉猎【78,118】。
现在主要的困难在于如何处理大型的、可伸缩的graph,一些基于采样的方法因此被提出【119】。
总结
本研究的目的不在于跟进那些最先进的研究成果,而在于将已经发表的经典进行梳理归纳。这就涉及到两个问题:
- 为所有的DGNs找到一个框架,【38,32,45,44】做出了自己的贡献。
- 为所有的DGNs提供统一的、公平的、可重复的测试平台,【25,93】认为这个工作已经迫在眉睫。
另外,PyG【30】和DGL【108】提供了DGNs的标准接口,使得我们可能轻松的实现我们的模型。



